Note:All illustrations on this page are displayed at 50% of their original size. To view any of the illustrations at their original size, simply click on (or otherwise select) the link shown after each picture. The selected picture will be displayed full size in a separate browser window.
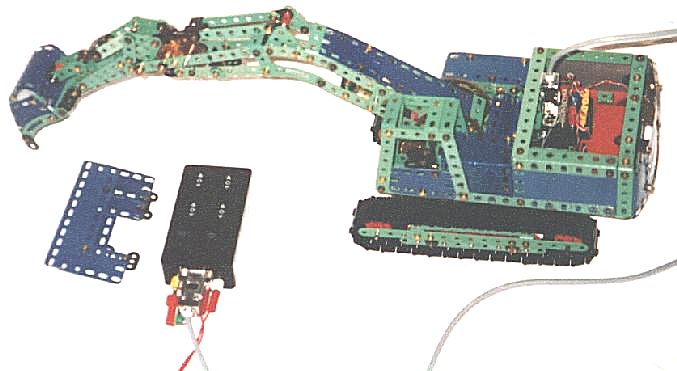
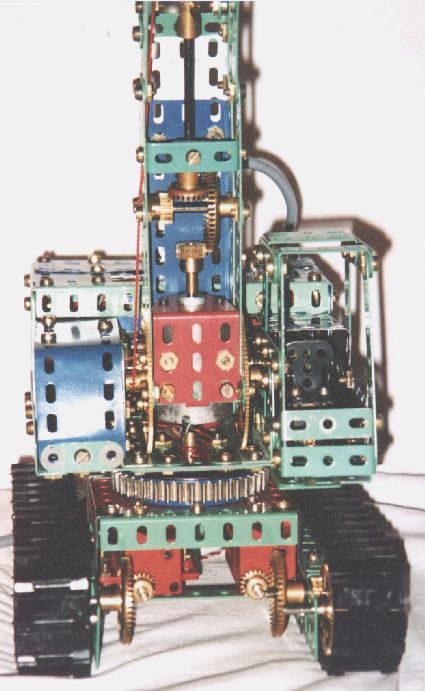
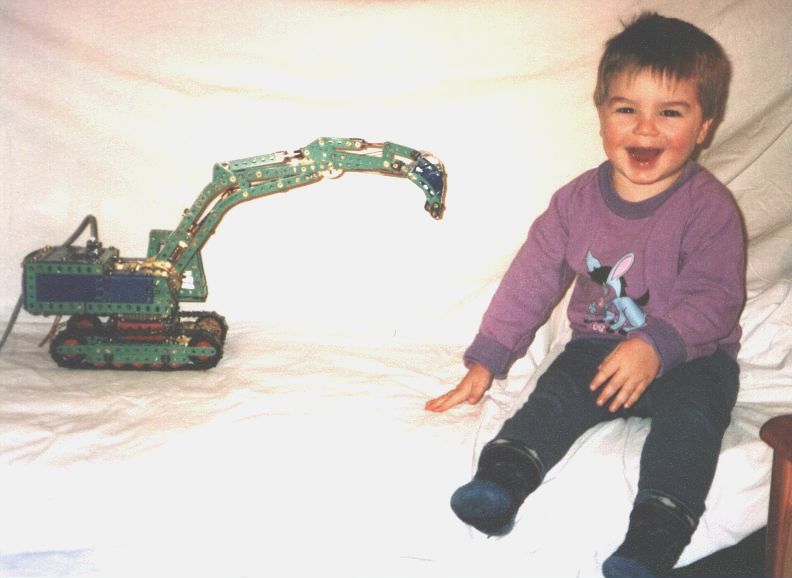
This model was designed after a die-cast "Siku" toy (like Matchbox). Scale decision was made according to the available track (3cm wide). As can be seen from the diagrams, there are 6 independent drives, one for each track, one for rotation and three for the digging movements:
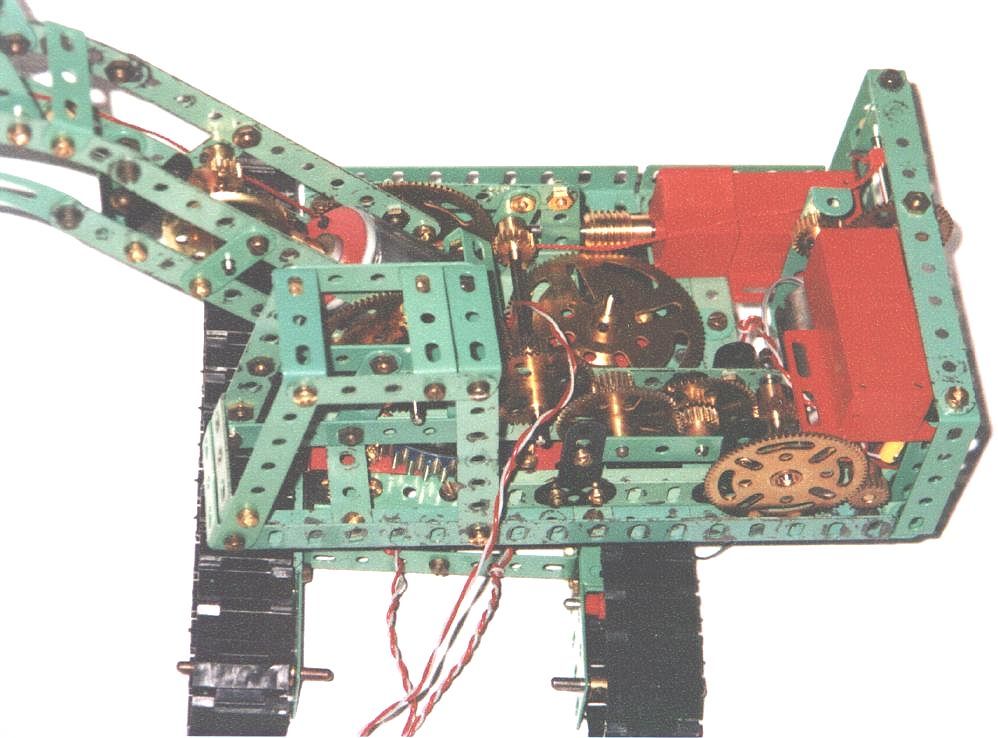
Boom and digging arm are operated by strong motors (from the 1062 "mechanics" extension set). The other motions are driven by motor + gearbox from the 1007 robot set. As the 1062 motors are oversized, it is sufficient to feed them with half the nominal voltage; thus all motors get 6 volts.
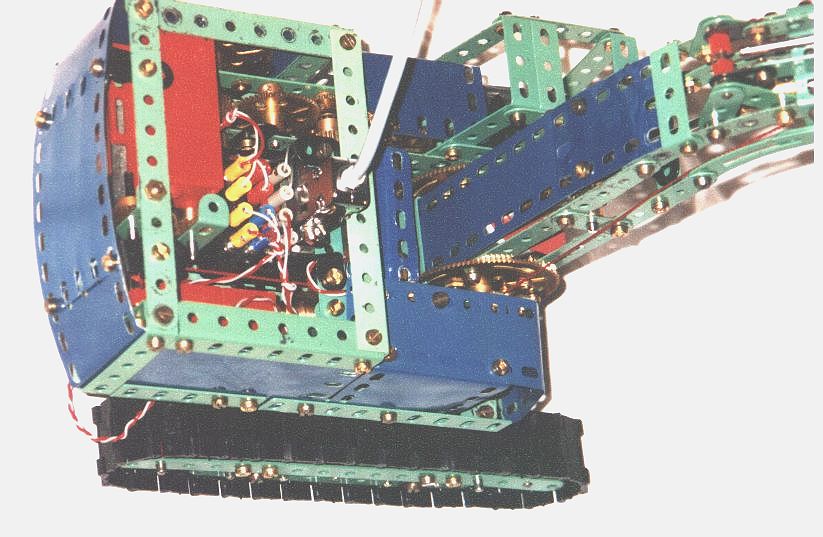
The turntable consists of a wheel (103650) with a ball bearing (2 x 11754 and 11758) neatly fitting inside, and a gear ring (109400, 40 teeth) outside. Unfortunately there is no central hole for wiring.
The switchboard is connected to the device by a 10-pole computer cable fitted with 9-pole sub-D plugs with their mass serving as 10th pole.
A point for improvement is the drives for the digging arm: for significant forces the worm should be avoided, as it suffers from high friction. This is a general point: worm gears are inefficient. Everybody who has ever built the 1007 robot will have noticed the slow and weak operation due to the excessive use of worms. However, to avoid worms you have to allocate many gear pairs, a real challenge when space is limited. Nevertheless, the rotation drive performs well.
A second point I'm not content with is the bucket drive. Probably a sort of bowden cable would be OK, but normal cycle brake cable is too stiff and thick for the chosen scale.
Select the link to download the file "excahtml.zip". Save the ZIP file in a new directory, and use your favourite "unzip" program to extract the files, then open the file "index.htm" in your browser to view these web pages offline. The download page has been set to black text on a white background to make printing easier.
Select the link to download the file "excatxt.zip", which contains a single text file (exca.txt) plus the 6 full size image files containing the illustrations used in these pages. Save the ZIP file in a new directory and use your favourite "unzip" program to extract the files. You can then print out the text file which contains the model notes, and view/print the images using your browser or your favourite graphics program.
COPYRIGHT NOTICE
These notes and the accompanying pictures are copyright material (belonging to Martin Kraska), and all rights are reserved. They are made freely available to Meccano modellers on condition that they are not copied and distributed in any form for sale, whether or not the sale is for profit or merely 'at cost'. Nor may they be distributed in incomplete form. Printed copies may however be made freely for personal use.